




 教育在线
教育在线


荣登《自然》封面!这位哈工程校友让软体机器人在马里亚纳海沟“翱翔”

3月4日
哈工程2010级船舶学院校友、
现任之江实验室智能机器人研究中心
高级研究专员李国瑞博士的
仿生智能机器人研究成果
论文《马里亚纳海沟中的自动软体机器人》(Self-powered soft robot in the Mariana Trench)
作为封面文章刊发在国际顶级期刊
《自然》

这身长22厘米,展翅28厘米的
小小机器鱼
顶住了马里亚纳海沟
6000至11000米之间的极高压
在其中自由“翱翔”
这一成果
为深海探测作业、环境的观察
和深海生物的科考提供了
新的解决方案
让电影中的科幻情节变成了现实

工作中的李国瑞
以第一作者登上《自然》期刊
这位年轻的哈工程校友
背后有怎样的科研故事?
快来跟小程一起向科研大神取经!
人物简介 /Profile/
李国瑞,2010级哈工程船舶工程学院船舶与海洋工程专业校友,现为之江实验室智能机器人研究中心高级研究专员。曾主持研究中国博士后科学基金面上项目“基于充电速率介电高弹聚合物力电耦合调控”和之江实验室青年基金项目“快响应气动软体机器人”。主要研究方向为电驱动软体机器鱼和深海软体机器智能驱动技术,相关成果发表于 Science Advances和 nature 封面文章。曾获全国大学生海洋航行器大赛特等奖、ICRA国际软体机器人大赛金奖、“力诺瑞特杯”第六届全国节能减排大赛三等奖、“启真杯”浙江大学 2018 年度十大学术成果等荣誉称号。
01、“把不可能变成可能,有创新的科研才有灵魂”
2020年8月27日凌晨三点,形似一条鱼,长22cm、翼展宽度28cm,完全无耐压壳保护的仿生软体机器人在中国南海3224米海深处实现自主游动。
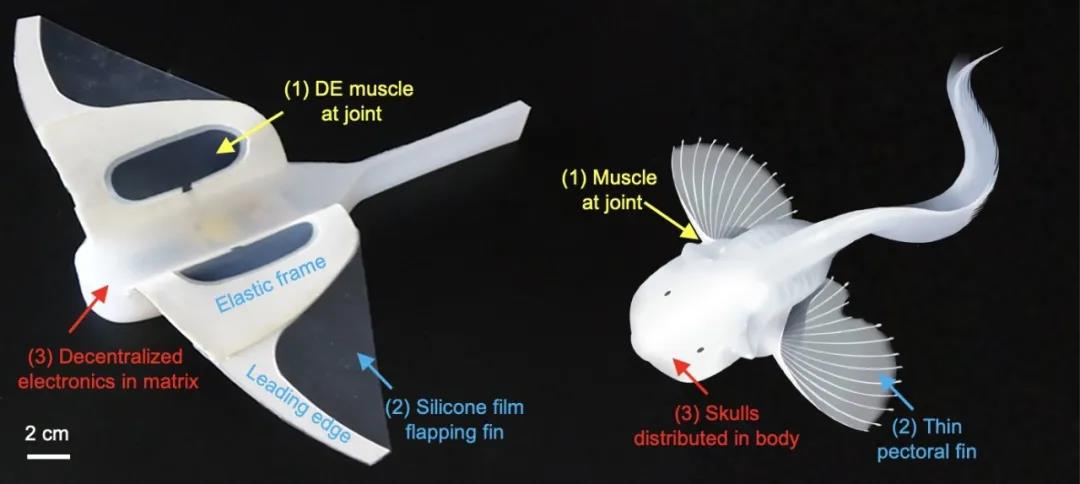
仿生狮子鱼深海软体机器人
“我在主控室看到机器人在海底游起来的那一刻,难以抑制的兴奋、激动,同时又感受到积压已久的压力瞬间得到了释放,数年的坚持终于取得了里程碑式进展。”李国瑞说。
与水下机器人的缘分,要追溯到李国瑞本科的时候,在哈尔滨工程大学船舶工程学院就读船舶与海洋工程专业的他,通过科技创新比赛接触到了水下机器人的相关方向,并连续两年获得了全国大学生海洋航行器大赛特等奖。
“哈工程的学风很严谨,也很注重培养学生的拓展能力,老师们对学生的科研工作非常支持。”时至今日,李国瑞仍记得自己做科研之初因为经费不足向系里船模水池实验副主任郭春雨老师申请时,立刻得到了2000元的科研经费支持,“那好像是2012年,2000元的科研经费对一个学生的科研工作真的是很大的支持。”现在回忆起来,李国瑞仍然很感动。
仿生软体机器人的初步构想产生于17年5月末,当时,他刚在水下软体机器人领域取得新进展,并以共同第一作者身份在Science子刊发表“Fast moving soft electronic fish”。
为了开拓研究思路,导师李铁风教授带他赴新加坡参加机器人领域的国际顶会ICRA学习。“一周的时间,白天听学术报告,晚上和导师总结讨论。就是在这种不设限的自由研讨中,我们第一次谈到了‘深海软机器’的设想。参考近几年深海科考的热点,我们思考如何借着深渊狮子鱼的启发,研制一种无需耐压壳保护就可承受深海静水压力的仿生软体机器人,实现深海探测装备的小型化与智能化。”李国瑞回忆道,“我们设定的小目标是在马里亚纳海沟实现软体机器人的自供能驱动,这在当时的确是一个很大胆的设想”。
02、“无论成败,终须事必躬亲的勇气!”
位于西太平洋的马里亚纳海沟是已知的海洋最深处,深约10911米,静水压极高(约1100个大气压强的压力)、温度低、完全黑暗,被称为“地球第四极”。

马里亚纳海沟10900米深海海试
在深海科考中,为了抵抗巨大的静水压力,现有的深海机器人均需高强度的金属耐压容器保护。而摒弃耐压壳保护和电机驱动,在深海实现软体机器人的自供能驱动,这件事儿还没有人干成过。在课题启动初期,李国瑞承受了不小的压力。
“无论成败,终须事必躬亲的勇气!越是有难度的科研,就越有创新的空间。”秉持着这样的想法,李国瑞开始了“摸着石头过河”式的研究。深海软机器,这是一个崭新的科研方向,鲜有先例可循,李国瑞尝试着从现有的深海装备技术和软体机器人文献中找到一些共性点,然后结合自己的力学背景开展探索。
“机器人研究是一项系统工程,从理论方案设计到实际样机验证,都有很大的挑战。好在国瑞很擅长跨领域思考,也具有很好的学科交叉思维,能够结合不同技术找到创新点。”导师李铁风教授如此评价他的这位学生。
“基于弹性软材料压力自适应的优势,不同于传统的‘铠甲式’抗高压深潜装备,我们将控制电路、电池等硬质器件融入集成在凝胶状的软基体中,并通过对结构和材料参数设计实现内部应力分布的调节,使软体机器人无需耐压外壳,便能承受万米级深海静水压力,并能大幅降低深海探测的难度和成本。”李国瑞说。
03、“每解决一个bug,就是向成功迈进一步”
2018年8月,在上海深渊科学技术研究中心,仿生深海软体机器人在110 MPa(11000米水深所对应静水压力)静水压的压力罐中实现了稳定的游动实验。

李国瑞(左二)与团队成员
这次成功来之不易,将近一年的时间,李国瑞每半个月就要去上海做一次机器人的压力实验验证,很多次都是信誓旦旦出发,带着遗憾归来。
克服过电子器件压溃、材料驱动失效、密封失败等各种各样的问题,李国瑞形容做研究就像是“升级打怪”,每次都会遇到不同的bug,但是从未想过放弃。
在研究历程中,系列的数值计算和大量的压力环境模拟实验验证了方案的可行性,但仿生深海软体机器人的可靠性仍需深海实地环境的测试。2018年底,李国瑞所在项目组第一次挑战万米深渊就取得了初步进展,软体驱动器及融合电子电路在万米海深实现稳定驱动。
2019年12月,仿生深海软体机器人成功坐底马里亚纳海沟,在10900米海深处实现了稳定扑翼运动;2020年8月,机器人在南海3224米实现自主游动。
“对于我们来说,一切海试都是不可控的,我们能做的就是在出海之前做好最充分的准备。”李国瑞说。就像最近一次的南海海试,项目组在南海遇到了超强台风,在海上整整漂了10天,仅获得了一次实验的机会。“台上一分钟,台下十年功,我们抓住了返航前一晚天气转好的唯一机会,做成了机器人的深海试验。”李国瑞说。
04、“组建深海软体机器研究团队,探秘深海无人之境”
目前,仿生深海软体机器人实现了两项关键性技术突破:适应深海静水压力的软—硬融合机器系统,适用于深海高压低温环境驱动的新型介电高弹体驱动器。
李国瑞(右二)和团队成员
未来,李国瑞希望依托这些共性技术,组建一个朝气蓬勃的研究团队,在仿生软体机器人与智能装备领域开展独立性研究,为提升智能机器人在深海、极地、高冲击性等恶劣及特种环境下的自主、智能作业能力贡献自己的力量。
对于哈工程的学弟学妹们,李国瑞学长也有自己的叮嘱,一是扎实学好自己的专业基础知识;二是广泛涉猎各领域,尝试交叉学科的科研工作;三是对于自己想做的事情要坚持到底。“我从选择水下机器人方向以来,期间也经历过很多挫折,到现在,我已经坚持了11年。在科研过程中,哪怕方向稍微调整也不要轻言放弃,坚持到底,就一定会有收获。”
免责声明:
① 凡本站注明“稿件来源:教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。